Create Plugin Tutorial¶
Description: This tutoial provides the information needed to create a plugin for use in the flatland simulator.
Tutorial Level: BEGINNER
With the flatland simulator, similar to Rviz, Gazebo and ROS, it is possible to extend the built-in functionality using plugins. A flatland simulator plugin is a C++ class that derives from the flatland_server::ModelPlugin base class.
This tutorial provides step by step instruction on how to write your own plugin and get it working inside the flatland simulator.
1. Prerequisites¶
The following tutorials provide a good foundation for understanding the flatland simulator architecture:
2. Getting Started¶
We will be creating a very simple plugin. The plugin will do one thing: print “Hello world” to the ROS_ERROR_STREAM. Even though the plugin itself is quite simple, the process for getting it to function inside Flatland simulator has many steps.
3. Install ROS¶
Go to the location on your harddrive you wish to install the Flatland stack. Create the top level of the cakin workspace:
mkdir flatland_ws
cd flatland_ws/
Create the source directory:
mkdir src
cd src
Git clone the Flatland stack:
git clone https://github.com/avidbots/flatland.git
cd ..
From inside the flatland_ws directory, build the software:
catkin_make
Source the setup file:
source devel/setup.bash
Run the Flatland simulator:
roslaunch flatland_server server.launch
You should see a Flatland window appear:
4. Create a Flatland Plugin¶
Go to model_plugin for detailed instructions on how to write a plugin.
Create a new file called simple.h in the flatland_plugins/include/flatland_plugins directory.
#include <flatland_server/model_plugin.h>
#ifndef FLATLAND_PLUGINS_SIMPLE_H
#define FLATLAND_PLUGINS_SIMPLE_H
using namespace flatland_server;
namespace flatland_tutorials {
class Simple : public ModelPlugin {
public:
void OnInitialize(const YAML::Node &config) override;
};
};
#endif
Create a new file called simple.cpp in the flatland_plugins/src directory.
#include <flatland_plugins/simple.h>
#include <pluginlib/class_list_macros.h>
#include <ros/ros.h>
using namespace flatland_server;
namespace flatland_tutorials {
void Simple::OnInitialize(const YAML::Node &config) {
ROS_ERROR_STREAM("Hello world");
}
};
PLUGINLIB_EXPORT_CLASS(flatland_tutorials::Simple, flatland_server::ModelPlugin)
5. Compiling the Plugin¶
You may need to add to the include path. Refer to the documentation for the specific SDK/editor you are using.
Edit the file flatland_plugins.xml. Add the following before the closing </library> tag.
<class type="flatland_plugins::Simple" base_class_type="flatland_server::ModelPlugin">
<description>Simplest possible plugin to print hello world</description>
</class>
Locate the add_library section and add the following before the closing ‘)’ :
src/simple.cpp
Edit the file flatland_server/test/conestogo_office_test/cleaner.model.yaml. After the line plugins: add the following followed by a blank line.
- type: Simple
name: simple
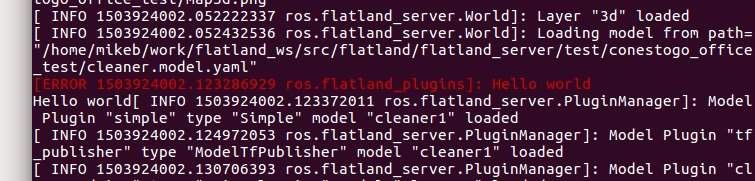
6. Running the Flatland simulator with installed plugin¶
Run the Flatland simulator:
roslaunch flatland_server server.launch
Kill the program and look at the console output. You should see the message “Hello world” embedded in the output.