Quick Start¶
Here is a quick guide for setting up 2D simulator.
Flatland uses YAML files to setup the simulation, much like how Gazebo uses URDF files.
Create a YAML file called world.yaml with the following content
Here we define a world with a layer called “map” and one model “turtlebot”. See Configuring World for more details.
properties: {} layers: - name: "map" map: "conestogo_office.yaml" color: [0.4, 0.4, 0.4, 1] models: - name: turtlebot model: "turtlebot.model.yaml"
One way of defining a layer map is to use data generated from ROS map_server, if you have map from map_server you can replace map.yaml with the path to the YAML file from map server, and skip the rest of this section. See Configuring Layers for more details.
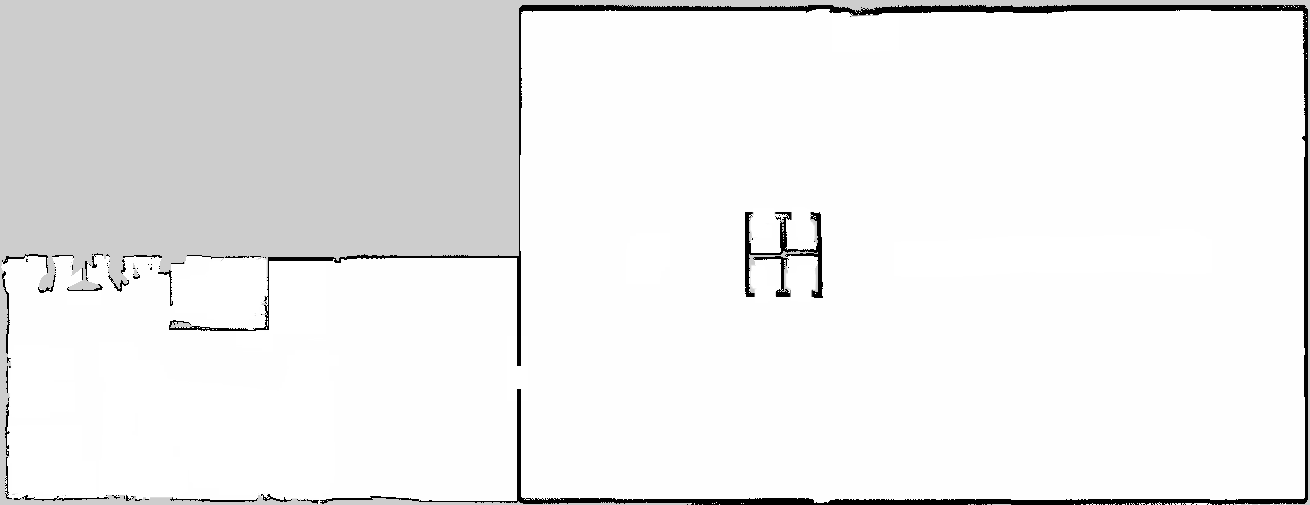
Otherwise, create a file named conestogo_office.yaml with the following content, download the map image below, and place both the yaml file and the image in the same directory as world.yaml
image: conestogo_office.png resolution: 0.050000 origin: [-16.600000, -6.650000, 0.000000] negate: 0 occupied_thresh: 0.65 free_thresh: 0.196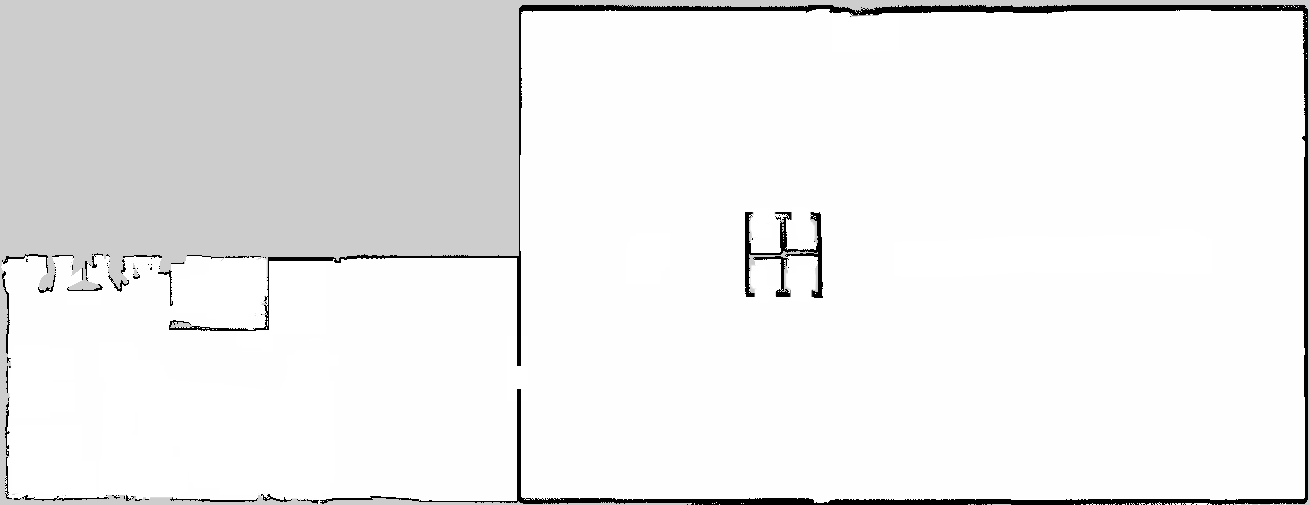
- To define a model, create a file named turtlebot.model.yaml with the following content and place it in the same directory as world.yaml. For more details about the model yaml format, see Configuring Models.
bodies: - name: base pose: [0, 0, 0] type: dynamic color: [1, 1, 1, 0.4] footprints: - type: circle radius: 0.5 density: 1 - type: polygon points: [[-.45, -.05], [-.45, 0.05], [-.35, 0.05], [-.35, -0.05]] density: 1 - type: polygon points: [[-.125, -.4], [-.125, -.3], [.125, -.3], [.125, -.4]] density: 1 - type: polygon points: [[-.125, .4], [-.125, .3], [.125, .3], [.125, .4]] density: 1 plugins: - type: DiffDrive name: turtlebot_drive body: base
- Finally, after having the Flatland packages installed. Run the launch file with the path to the world.yaml. You should be able to see the flatland_viz window with the map and the robot. You can send Twist commands to /cmd_vel to move the robot.
$ roslaunch flatland_server server.launch world_path:=/path/to/world.yaml